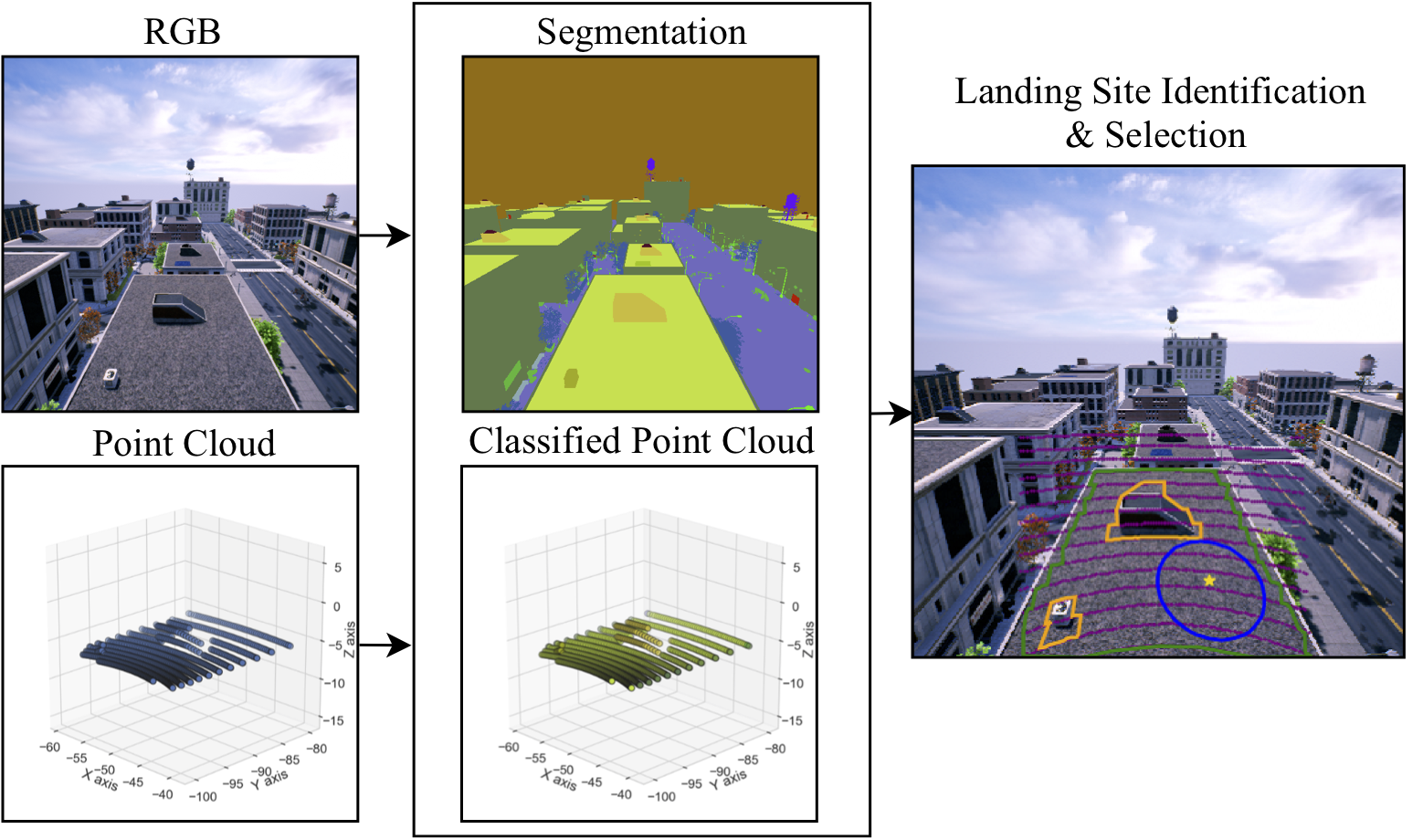
 The pipeline of our landing site identification method. RGB images and point cloud are synchronized and separately process by image semantic segmentation algorithms and poly-lidar algorithm. The best landing site is localized by late fusion and searching for the largest feasible circle.
The pipeline of our landing site identification method. RGB images and point cloud are synchronized and separately process by image semantic segmentation algorithms and poly-lidar algorithm. The best landing site is localized by late fusion and searching for the largest feasible circle.
The pipeline of our landing site identification method. RGB images and point cloud are synchronized and separately process by image semantic segmentation algorithms and poly-lidar algorithm. The best landing site is localized by late fusion and searching for the largest feasible circle.
The pipeline of our landing site identification method. RGB images and point cloud are synchronized and separately process by image semantic segmentation algorithms and poly-lidar algorithm. The best landing site is localized by late fusion and searching for the largest feasible circle.